手眼标定
分为两种情况,眼在手外与眼在手上
手眼标定的目标是获得相机坐标系到机器人的基坐标系变换矩阵
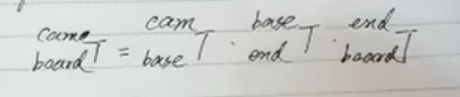
对于基矩阵到摄像头矩阵,首先选取标定板的三个基向量拼接成为R矩阵。然后以标定板原点的坐标为t。
最后为了防止标定板的xy向量不正交,最好在xz方向重新叉乘得到新的y向量,以此提升精度
在选取标定板基向量时选取较远的起点与中点较为准确
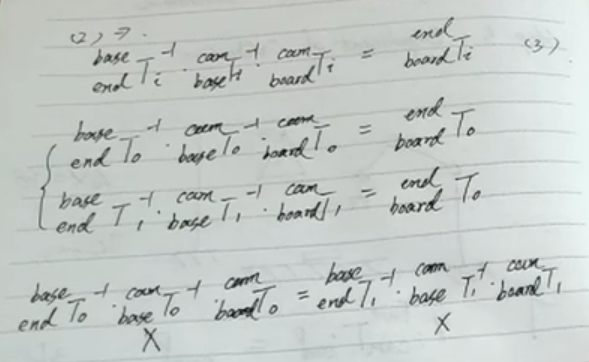
将标定板放置在机械臂的末端法兰上,而这个矩阵是较为难以估计的,想办法消除
左乘基坐标到摄像头矩阵的逆,左乘法兰到基坐标的矩阵的逆
多次照相并联立方程
分为两种情况,眼在手外与眼在手上
手眼标定的目标是获得相机坐标系到机器人的基坐标系变换矩阵
对于基矩阵到摄像头矩阵,首先选取标定板的三个基向量拼接成为R矩阵。然后以标定板原点的坐标为t。
最后为了防止标定板的xy向量不正交,最好在xz方向重新叉乘得到新的y向量,以此提升精度
在选取标定板基向量时选取较远的起点与中点较为准确
将标定板放置在机械臂的末端法兰上,而这个矩阵是较为难以估计的,想办法消除
左乘基坐标到摄像头矩阵的逆,左乘法兰到基坐标的矩阵的逆
多次照相并联立方程
本文采用 署名-非商业性使用-相同方式共享 4.0 国际 许可协议,转载请注明出处。
